Detección basada en la “luz”
¿Qué es un sensor láser de tipo de reconocimiento de “posición”?
Introducción
Este tipo de sensor detecta la posición del objeto. Esto se logra mediante el uso de un sistema de triangulación o uno de medición de tiempo.
Principio y tipos principales
Sistema de triangulación
El cambio en la distancia hasta el objeto afecta la posición de la luz concentrada en el elemento de detección CMOS. Esta información se utiliza para detectar la posición del objeto.
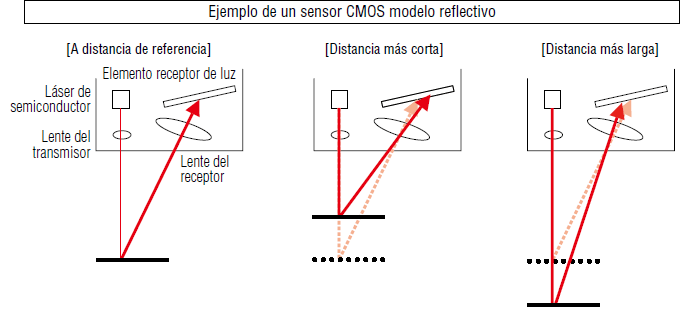
El láser emite un rayo láser hacia el objeto como se muestra arriba. La luz reflejada por el objeto es concentrada por el lente del receptor, formando una imagen sobre el elemento receptor de luz. Cuando la distancia cambia, la luz concentrada se refleja en un ángulo diferente, y la posición de la imagen cambia correspondientemente.
Sistema de medición de tiempo
La distancia se mide en base al tiempo que el rayo láser emitido tarda en retornar al sensor, tras incidir en el objeto. La detección no se ve afectada por el estado de la superficie del objeto.
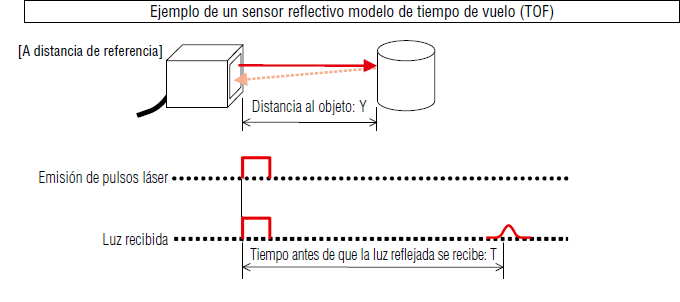
En la figura de la derecha, el sensor detecta el tiempo (T) transcurrido hasta que se recibe el rayo láser reflejado, para calcular la distancia (Y). La fórmula de cálculo es: 2Y (distancia de ida y vuelta) = C (velocidad de la luz) × T (tiempo hasta que se recibe la luz reflejada)

-
Detección basada en la “luz”
Características y ventajas de los sensores láser de tipo de reconocimiento de “luz recibida”
Sensores láser: Tipo de reconocimiento por la “luz recibida” -
Detección basada en la “luz”
Características de los sensores láser de tipo de reconocimiento de “posición”
Sensores láser: Detección de la “posición”