Sensor de proximidad digital con amplificador independiente
Serie ER-N
Diagramas de características Sensor de proximidad digital con amplificador independiente Serie ER-N
ER-NH028
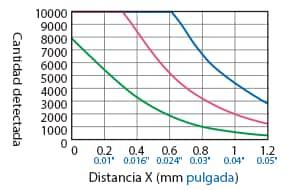
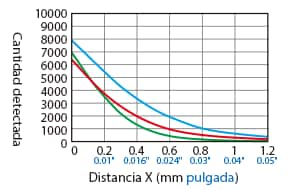
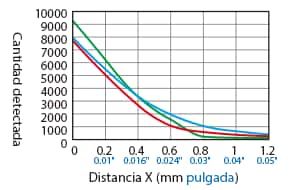
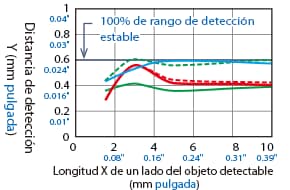
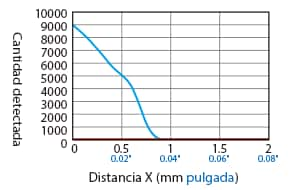
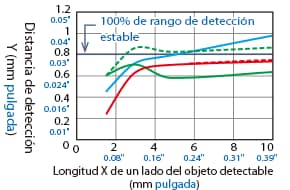
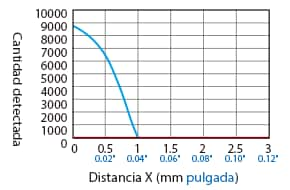
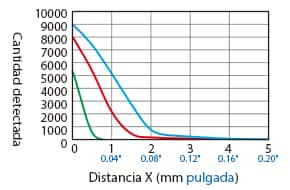
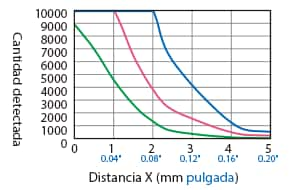
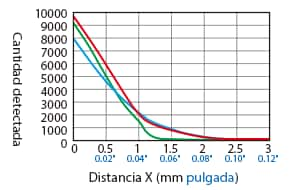
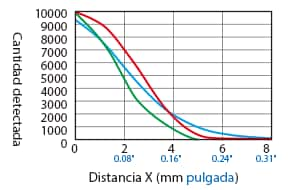
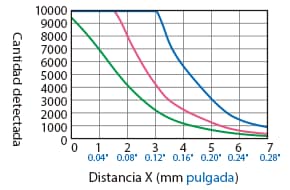
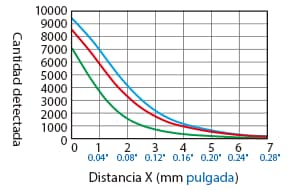
Distancia - Características de la cantidad de detección (Ejemplo típico)
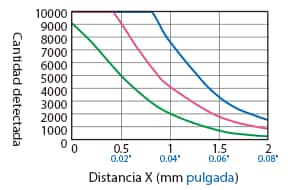
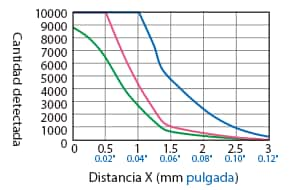
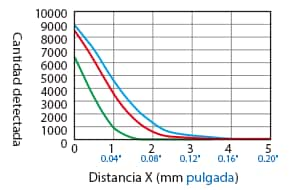
Diferencia en las características según las condiciones de ajuste (Modo de operación: Normal)

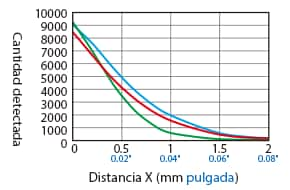
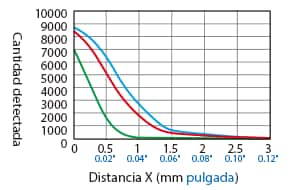
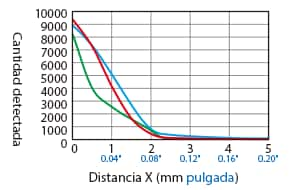
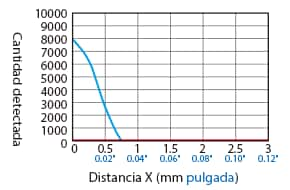
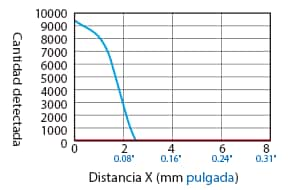
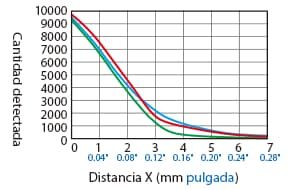
Diferencia en las características según el modo de operación (Ajuste de origen sin objeto detectable)
[Modo de operación: Normal]
[Modo de operación: Híbrido]
[Modo de operación: Metal ferroso]
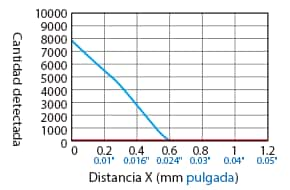
[Modo de operación: Metal no ferroso]
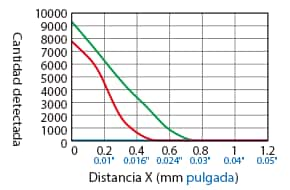
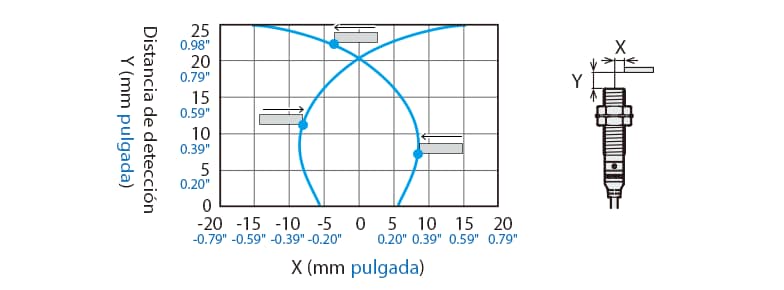
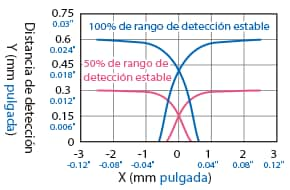
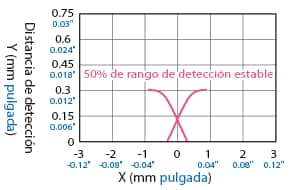
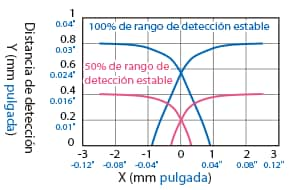
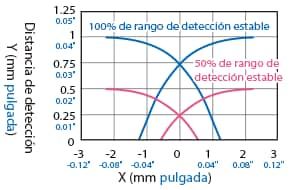
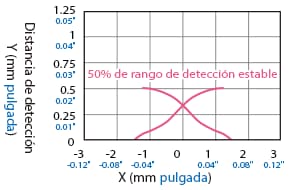
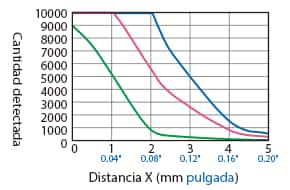
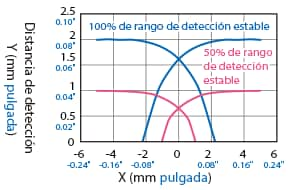
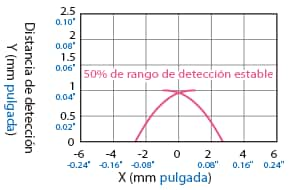
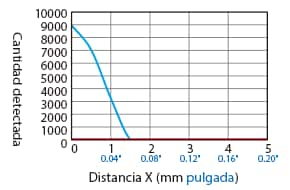
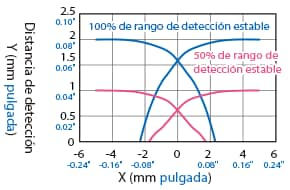
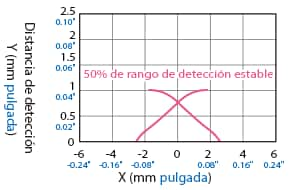
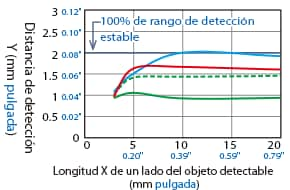
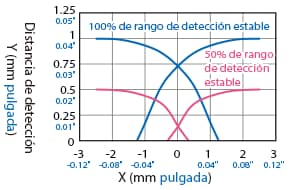
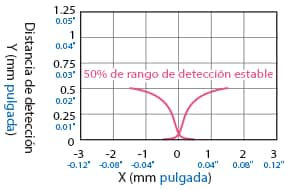
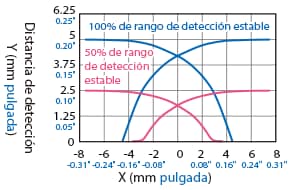
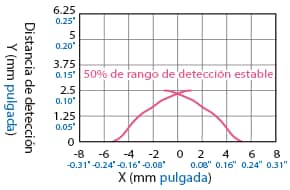
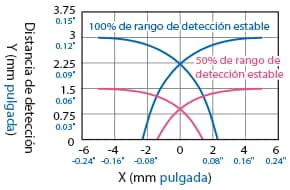
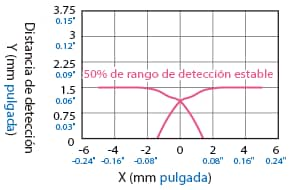
Diagrama de área de detección (Ejemplo típico)
Cuando el origen se ajusta sin objeto detectable, y cuando el centro del sensor está alineado con y mirando al objeto detectable a una distancia del 100% o 50% del rango de detección estable, el valor mostrado se usa como el valor establecido.
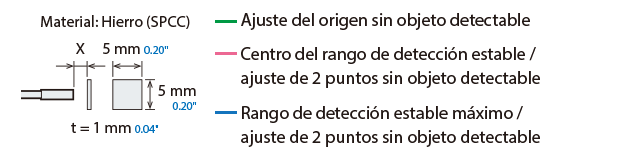
Tamaño del objeto detectable: 5 mm × 5 mm 0.20″ × 0.20″, Grosor t = 1 mm 0.04″ (tamaño de objeto detectable estándar), Modo normal
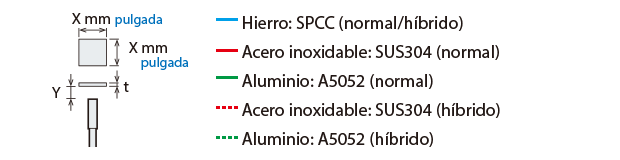
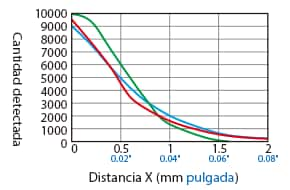
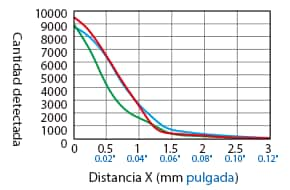
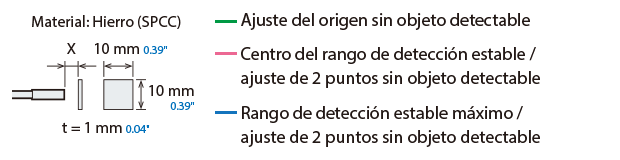
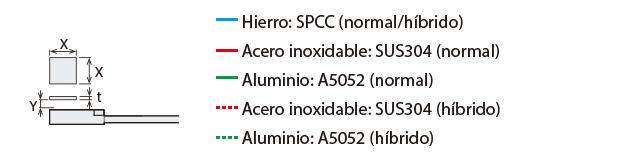
Objeto detectable: Hierro (SPCC)
Objeto detectable: Aluminio (A5052)
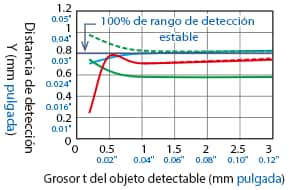
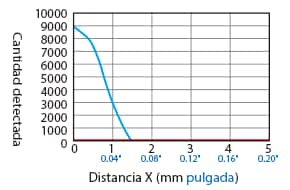
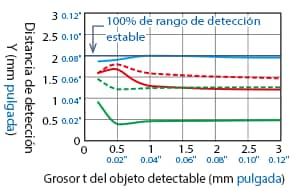
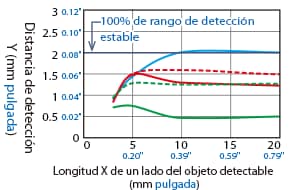
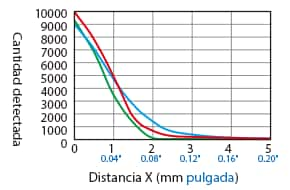
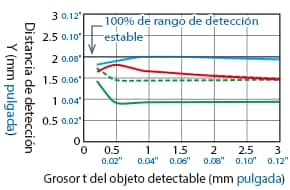
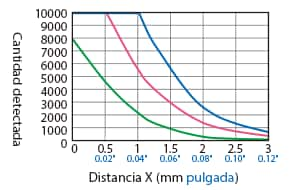
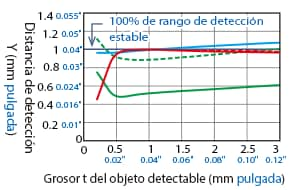
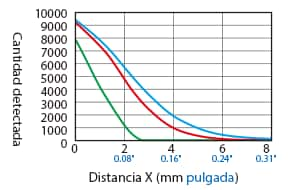
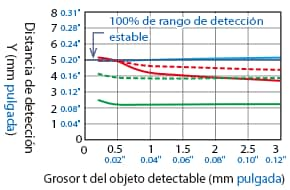
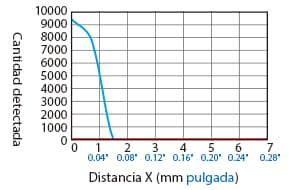
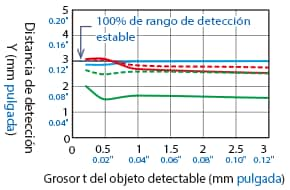
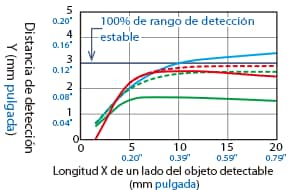
Variación de la distancia de detección según el tamaño y el material del objeto detectable (Ejemplo típico)
Cuando un objeto detectable estándar se coloca al 50% del rango de detección estable, y cuando el ajuste de dos puntos se realiza sin objeto detectable, el valor mostrado cuando el objeto detectable estándar está al 100% del rango de detección estable se usa como el valor establecido. La distancia de detección se vuelve más corta cuando el modo de operación se establece en metal ferroso/no ferroso.
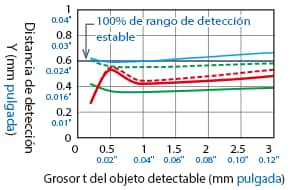
Tamaño del objeto detectable: 5 mm × 5 mm 0.20″ × 0.20″, Grosor = t mm
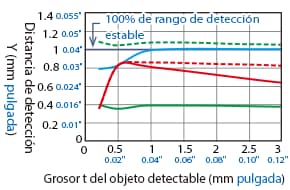
Efecto del grosor del objeto detectable
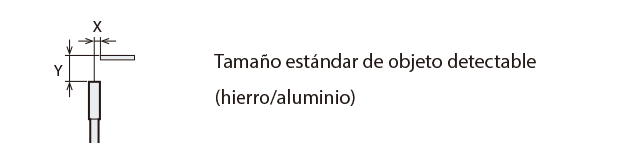
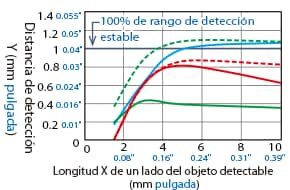
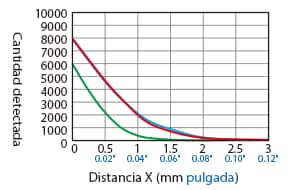
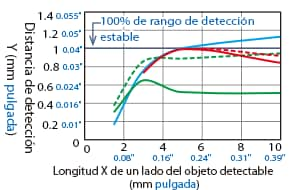
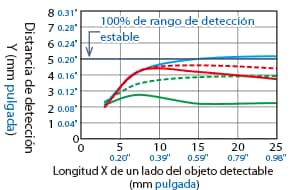
Tamaño del objeto detectable: X × X, Grosor t = 1 mm 0.04″
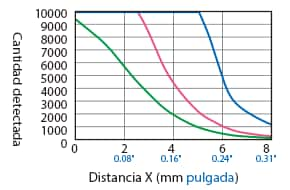
Efecto del tamaño del objeto detectable
ER-NH038
Distancia - Características de la cantidad de detección (Ejemplo típico)
Diferencia en las características según las condiciones de ajuste (Modo de operación: Normal)
Diferencia en las características según el modo de operación (Ajuste de origen sin objeto detectable)
[Modo de operación: Normal]
[Modo de operación: Híbrido]
[Modo de operación: Metal ferroso]
[Modo de operación: Metal no ferroso]
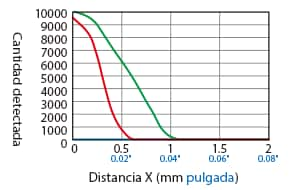
Diagrama de área de detección (Ejemplo típico)
Cuando el origen se ajusta sin objeto detectable, y cuando el centro del sensor está alineado con y mirando al objeto detectable a una distancia del 100% o 50% del rango de detección estable, el valor mostrado se usa como el valor establecido.
Tamaño del objeto detectable: 5 mm × 5 mm 0.20″ × 0.20″, Grosor t = 1 mm 0.04″ (tamaño de objeto detectable estándar), Modo normal
Objeto detectable: Hierro (SPCC)
Objeto detectable: Aluminio (A5052)

Variación de la distancia de detección según el tamaño y el material del objeto detectable (Ejemplo típico)
Cuando un objeto detectable estándar se coloca al 50% del rango de detección estable, y cuando el ajuste de dos puntos se realiza sin objeto detectable, el valor mostrado cuando el objeto detectable estándar está al 100% del rango de detección estable se usa como el valor establecido. La distancia de detección se vuelve más corta cuando el modo de operación se establece en metal ferroso/no ferroso.
Tamaño del objeto detectable: 5 mm × 5 mm 0.20″ × 0.20″, Grosor = t mm
Efecto del grosor del objeto detectable
Tamaño del objeto detectable: X × X, Grosor t = 1 mm 0.04″
Efecto del tamaño del objeto detectable
ER-NH054(G)
Distancia - Características de la cantidad de detección (Ejemplo típico)
Diferencia en las características según las condiciones de ajuste (Modo de operación: Normal)
Diferencia en las características según el modo de operación (Ajuste de origen sin objeto detectable)
[Modo de operación: Normal]
[Modo de operación: Híbrido]
[Modo de operación: Metal ferroso]
[Modo de operación: Metal no ferroso]
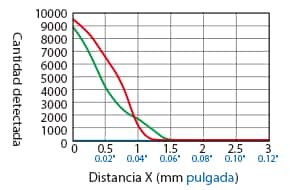
Diagrama de área de detección (Ejemplo típico)
Cuando el origen se ajusta sin objeto detectable, y cuando el centro del sensor está alineado con y mirando al objeto detectable a una distancia del 100% o 50% del rango de detección estable, el valor mostrado se usa como el valor establecido.
Tamaño del objeto detectable: 5 mm × 5 mm 0.20″ × 0.20″, Grosor t = 1 mm 0.04″ (tamaño de objeto detectable estándar), Modo normal
Objeto detectable: Hierro (SPCC)
Objeto detectable: Aluminio (A5052)
Variación de la distancia de detección según el tamaño y el material del objeto detectable (Ejemplo típico)
Cuando un objeto detectable estándar se coloca al 50% del rango de detección estable, y cuando el ajuste de dos puntos se realiza sin objeto detectable, el valor mostrado cuando el objeto detectable estándar está al 100% del rango de detección estable se usa como el valor establecido. La distancia de detección se vuelve más corta cuando el modo de operación se establece en metal ferroso/no ferroso.
Tamaño del objeto detectable: 5 mm × 5 mm 0.20″ × 0.20″, Grosor = t mm
Efecto del grosor del objeto detectable
Tamaño del objeto detectable: X × X, Grosor t = 1 mm 0.04″
Efecto del tamaño del objeto detectable
ER-NH080(G)
Distancia - Características de la cantidad de detección (Ejemplo típico)
Diferencia en las características según las condiciones de ajuste (Modo de operación: Normal)

Diferencia en las características según el modo de operación (Ajuste de origen sin objeto detectable)
[Modo de operación: Normal]
[Modo de operación: Híbrido]
[Modo de operación: Metal ferroso]
[Modo de operación: Metal no ferroso]
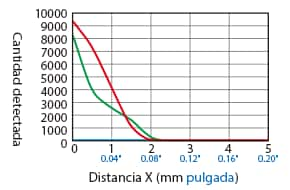
Diagrama de área de detección (Ejemplo típico)
Cuando el origen se ajusta sin objeto detectable, y cuando el centro del sensor está alineado con y mirando al objeto detectable a una distancia del 100% o 50% del rango de detección estable, el valor mostrado se usa como el valor establecido.
Tamaño del objeto detectable: 10 mm × 10 mm 0.39″ × 0.39″, Grosor t = 1 mm 0.04″ (tamaño de objeto detectable estándar), Modo normal
Objeto detectable: Hierro (SPCC)
Objeto detectable: Aluminio (A5052)
Variación de la distancia de detección según el tamaño y el material del objeto detectable (Ejemplo típico)
Cuando un objeto detectable estándar se coloca al 50% del rango de detección estable, y cuando el ajuste de dos puntos se realiza sin objeto detectable, el valor mostrado cuando el objeto detectable estándar está al 100% del rango de detección estable se usa como el valor establecido. La distancia de detección se vuelve más corta cuando el modo de operación se establece en metal ferroso/no ferroso.
Tamaño del objeto detectable: 10 mm × 10 mm 0.39″ × 0.39″, Grosor = t mm
Efecto del grosor del objeto detectable
Tamaño del objeto detectable: X × X, Grosor t = 1 mm 0.04″
Efecto del tamaño del objeto detectable
ER-NH100(G)
Distancia - Características de la cantidad de detección (Ejemplo típico)
Diferencia en las características según las condiciones de ajuste (Modo de operación: Normal)
Diferencia en las características según el modo de operación (Ajuste de origen sin objeto detectable)
[Modo de operación: Normal]
[Modo de operación: Híbrido]
[Modo de operación: Metal ferroso]
[Modo de operación: Metal no ferroso]
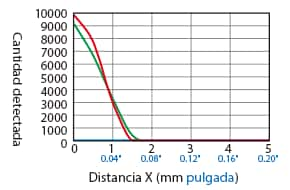
Diagrama de área de detección (Ejemplo típico)
Cuando el origen se ajusta sin objeto detectable, y cuando el centro del sensor está alineado con y mirando al objeto detectable a una distancia del 100% o 50% del rango de detección estable, el valor mostrado se usa como el valor establecido.
Tamaño del objeto detectable: 10 mm × 10 mm 0.39″ × 0.39″, Grosor t = 1 mm 0.04″ (tamaño de objeto detectable estándar), Modo normal
Objeto detectable: Hierro (SPCC)
Objeto detectable: Aluminio (A5052)
Variación de la distancia de detección según el tamaño y el material del objeto detectable (Ejemplo típico)
Cuando un objeto detectable estándar se coloca al 50% del rango de detección estable, y cuando el ajuste de dos puntos se realiza sin objeto detectable, el valor mostrado cuando el objeto detectable estándar está al 100% del rango de detección estable se usa como el valor establecido. La distancia de detección se vuelve más corta cuando el modo de operación se establece en metal ferroso/no ferroso.
Tamaño del objeto detectable: 10 mm × 10 mm 0.39″ × 0.39″, Grosor = t mm
Efecto del grosor del objeto detectable
Tamaño del objeto detectable: X × X, Grosor t = 1 mm 0.04″
Efecto del tamaño del objeto detectable
ER-NH035F
Distancia - Características de la cantidad de detección (Ejemplo típico)
Diferencia en las características según las condiciones de ajuste (Modo de operación: Normal)

Diferencia en las características según el modo de operación (Ajuste de origen sin objeto detectable)
[Modo de operación: Normal]
[Modo de operación: Híbrido]
[Modo de operación: Metal ferroso]
[Modo de operación: Metal no ferroso]
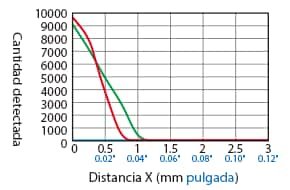
Diagrama de área de detección (Ejemplo típico)
Cuando el origen se ajusta sin objeto detectable, y cuando el centro del sensor está alineado con y mirando al objeto detectable a una distancia del 100% o 50% del rango de detección estable, el valor mostrado se usa como el valor establecido.

Tamaño del objeto detectable: 5 mm × 5 mm 0.20″ × 0.20″, Grosor t = 1 mm 0.04″ (tamaño de objeto detectable estándar), Modo normal
Objeto detectable: Hierro (SPCC)
Objeto detectable: Aluminio (A5052)
Variación de la distancia de detección según el tamaño y el material del objeto detectable (Ejemplo típico)
Cuando un objeto detectable estándar se coloca al 50% del rango de detección estable, y cuando el ajuste de dos puntos se realiza sin objeto detectable, el valor mostrado cuando el objeto detectable estándar está al 100% del rango de detección estable se usa como el valor establecido. La distancia de detección se vuelve más corta cuando el modo de operación se establece en metal ferroso/no ferroso.
Tamaño del objeto detectable: 5 mm × 5 mm 0.20″ × 0.20″, Grosor = t mm
Efecto del grosor del objeto detectable
Tamaño del objeto detectable: X × X, Grosor t = 1 mm 0.04″
Efecto del tamaño del objeto detectable
ER-NH048F
Distancia - Características de la cantidad de detección (Ejemplo típico)
Diferencia en las características según las condiciones de ajuste (Modo de operación: Normal)
Diferencia en las características según el modo de operación (Ajuste de origen sin objeto detectable)
[Modo de operación: Normal]
[Modo de operación: Híbrido]
[Modo de operación: Metal ferroso]
[Modo de operación: Metal no ferroso]
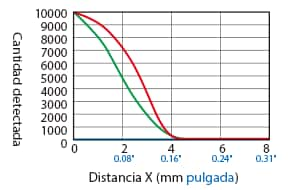
Diagrama de área de detección (Ejemplo típico)
Cuando el origen se ajusta sin objeto detectable, y cuando el centro del sensor está alineado con y mirando al objeto detectable a una distancia del 100% o 50% del rango de detección estable, el valor mostrado se usa como el valor establecido.
Tamaño del objeto detectable: 15 mm × 15 mm 0.59″ × 0.59″, Grosor t = 1 mm 0.04″ (tamaño de objeto detectable estándar), Modo normal
Objeto detectable: Hierro (SPCC)
Objeto detectable: Aluminio (A5052)
Variación de la distancia de detección según el tamaño y el material del objeto detectable (Ejemplo típico)
Cuando un objeto detectable estándar se coloca al 50% del rango de detección estable, y cuando el ajuste de dos puntos se realiza sin objeto detectable, el valor mostrado cuando el objeto detectable estándar está al 100% del rango de detección estable se usa como el valor establecido. La distancia de detección se vuelve más corta cuando el modo de operación se establece en metal ferroso/no ferroso.
Tamaño del objeto detectable: 15 mm × 15 mm 0.59″ × 0.59″, Grosor = t mm
Efecto del grosor del objeto detectable
Tamaño del objeto detectable: X × X, Grosor t = 1 mm 0.04″
Efecto del tamaño del objeto detectable
ER-NH028U
Distancia - Características de la cantidad de detección (Ejemplo típico)
Diferencia en las características según las condiciones de ajuste (Modo de operación: Normal)
Diferencia en las características según el modo de operación (Ajuste de origen sin objeto detectable)
[Modo de operación: Normal]
[Modo de operación: Híbrido]
[Modo de operación: Metal ferroso]
[Modo de operación: Metal no ferroso]
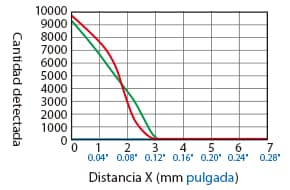
Diagrama de área de detección (Ejemplo típico)
Cuando el origen se ajusta sin objeto detectable, y cuando el centro del sensor está alineado con y mirando al objeto detectable a una distancia del 100% o 50% del rango de detección estable, el valor mostrado se usa como el valor establecido.
Tamaño del objeto detectable: 10 mm × 10 mm 0.39″ × 0.39″, Grosor t = 1 mm 0.04″ (tamaño de objeto detectable estándar), Modo normal
Objeto detectable: Hierro (SPCC)
Objeto detectable: Aluminio (A5052)
Variación de la distancia de detección según el tamaño y el material del objeto detectable (Ejemplo típico)
Cuando un objeto detectable estándar se coloca al 50% del rango de detección estable, y cuando el ajuste de dos puntos se realiza sin objeto detectable, el valor mostrado cuando el objeto detectable estándar está al 100% del rango de detección estable se usa como el valor establecido. La distancia de detección se vuelve más corta cuando el modo de operación se establece en metal ferroso/no ferroso.
Tamaño del objeto detectable: 10 mm × 10 mm 0.39″ × 0.39″, Grosor = t mm
Efecto del grosor del objeto detectable
Tamaño del objeto detectable: X × X, Grosor t = 1 mm 0.04″
Efecto del tamaño del objeto detectable
Cómo leer diagramas de área de detección
A continuación se muestra la posición del punto ON cuando el objeto detectable estándar (indicado en las especificaciones) se mueve de forma paralela al sensor en la dirección de la flecha.