Para medir un objeto mediante un sensor de desplazamiento láser, el receptor debe ser capaz de obtener la luz reflejada por el objeto. En los sistemas de medición que utilizan el método de triangulación, y en función de las condiciones de la superficie de un objeto, los cabezales de los sensores se instalan en ángulo para que la luz reflejada se pueda recibir correctamente.
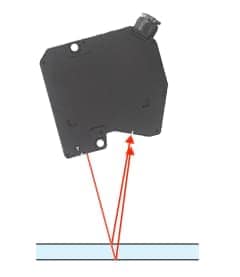
A) Con objetos opacos
El objeto y el cabezal del sensor se instalan en paralelo.
Una parte de la luz difusa es recibida por el receptor.
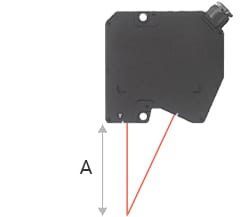
B) Con objetos transparentes
El sensor se instala de forma que el ángulo de incidencia y el ángulo de reflexión sean iguales.
La luz de reflexión especular es recibida por el receptor.
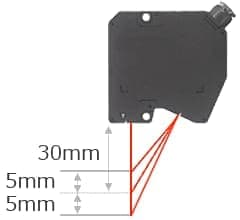
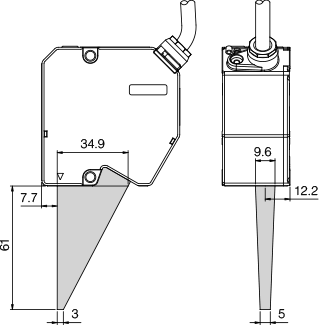
La distancia de referencia es el punto cero por defecto de los cabezales del sensor. Esto se representa comúnmente como la distancia desde la parte inferior del cabezal del sensor hasta el centro del rango de medición.
El rango de medición es el campo en el que un sensor puede realizar una medición. Los rangos de medición se escriben generalmente como ±xx mm basándose en la distancia de referencia.
[Ejemplo]
Distancia de referencia: 30 mm (1.18")
Rango de medición: ±5 mm (±0.20")
Un sensor de desplazamiento láser como el descrito anteriormente puede medir objetos en el siguiente rango.
En los sistemas de medición sin contacto, el transmisor irradia el objeto con luz, y la luz reflejada es capturada por el receptor. Para esta iluminación se puede utilizar una gran variedad de fuentes de luz, incluyendo láseres de semiconductores rojos, láseres de semiconductores azules, luz blanca, SLDs y LEDs verdes. El tipo de fuente de luz utilizado viene determinado por el principio del sistema de medición. El uso de la lente o del elemento receptor de luz adecuado para una fuente de luz, hace posible una medición de alta precisión.
Con los sistemas de medición sin contacto, generalmente hay dos tipos de puntos de haz, elípticos y circulares. Los puntos elípticos se utilizan para medir las alturas promedio dentro de un área y son menos susceptibles a la influencia de la rugosidad de la superficie del objeto. Sin embargo, a medida que aumenta el tamaño del punto, se vuelve menos adecuado para perfilar formas o medir objetos pequeños. Por otro lado, debido a que el tamaño de un punto circular es más pequeño, es efectivo para realizar estas inspecciones.
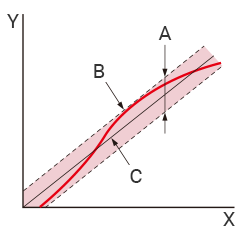
La linealidad es un indicador de la capacidad de un sistema de medición. Representa el valor máximo de error entre un valor ideal y el resultado real de la medición. Por ejemplo, cuando un objeto se mueve 1 mm (0.04″) utilizando un sistema de medición con una linealidad de ±5 µm (±0.20 Mil), se dice que el valor visualizado posiblemente incluya un margen de error de ±5 µm (±0.20 Mil) (por ejemplo, 9.995 µm (0.39 Mil) a 1.005 µm (0.04 Mil)). Las especificaciones de linealidad se definen como ±○○% de F.E., donde F.E. (fondo de escala) representa el rango de medición. El cálculo se realiza de la siguiente manera. Es razonable decir que los sistemas de medición con menor linealidad son mejores.
Por ejemplo, con un sistema de medición que tiene una linealidad del 0.02% de F.E. y un rango de medición de ±3 mm (±0.12") (F.E. = 6 mm (0.24")), la linealidad será de 0.02% × 6 mm (0.24") = ±1.2 µm (±0.05 Mil).
Las características de temperatura representan el valor máximo de error de medición que se produce cuando la temperatura del cabezal del sensor cambia un grado. En el interior del cabezal hay una lente y un sensor CMOS, así como plantillas para asegurar estos elementos. Los cambios de temperatura hacen que estos componentes se expandan y contraigan, cambiando la posición de la ubicación de la imagen en el CMOS y causan errores. Las características de temperatura se definen como ±○○% de F.E./℃, donde F.E. (fondo de escala) representa el rango de medición. El cálculo se realiza de la siguiente manera. Es razonable decir que los sistemas de medición con características de temperatura más pequeñas son mejores. Por ejemplo, con un sistema de medición que tiene una característica de temperatura de 0.01% de F.E./℃ y un rango de medición de ±3 mm (±0.12") (F.E. = 6 mm (0.24")), la linealidad será de 0.01% × 6 mm (0.24") = ±0.6 µm (±0.02 Mil).
La luz ambiental se refiere a la máxima intensidad de iluminación de una fuente de luz externa con la que el sistema de medición puede medir sin verse afectado.
La resistencia a las vibraciones es un índice que muestra la influencia que tendrán las vibraciones en un sistema de medición. Los valores mostrados indican la evaluación realizada. Por ejemplo, la descripción general de “10 a 55 Hz, 1.5 mm (0.06") de amplitud doble, 2 horas en las direcciones X, Y y Z” implica específicamente que se ha realizado la siguiente prueba. Vibración realizada durante 2 horas a una frecuencia de 10 a 55 Hz con una amplitud de ±0.75 mm (±0.03") en la dirección X ⇓ Vibración realizada durante 2 horas a una frecuencia de 10 a 55 Hz con una amplitud de ±0.75 mm (±0.03") en la dirección Y ⇓ Vibración realizada durante 2 horas a una frecuencia de 10 a 55 Hz con una amplitud de ±0.75 mm (±0.03") en la dirección Z
La frecuencia de muestreo / velocidad de muestreo representa el número de puntos de datos que el sistema de medición puede medir por segundo. Un sistema de medición con una frecuencia de muestreo de 100 Hz puede realizar 100 mediciones en 1 segundo. Los sistemas de medición con frecuencias de muestreo más rápidas son capaces de proporcionar mediciones de objetivos más precisas con la medición en línea y, debido a que se pueden realizar múltiples procesos de promedio a la vez, las mediciones serán estables.
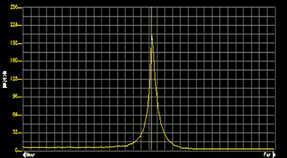
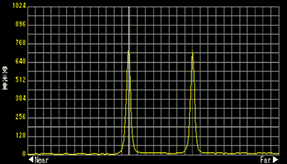
El patrón de onda de luz recibida representa el estado de la luz recibida por el elemento receptor de luz. El eje vertical representa la intensidad de la luz, y el eje horizontal muestra la posición en el elemento receptor de luz. La comprobación de la forma del patrón de onda de luz recibida permite determinar si la medición actual se está realizando con precisión.
(1) Patrón de onda de luz recibida ideal
Este patrón de onda de luz recibida permite una medición estable.
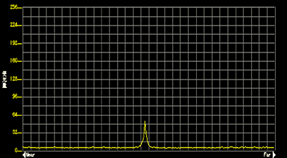
(2) Altura del patrón de onda de luz recibida corta
La medición no puede realizarse porque la cantidad de luz reflejada obtenida es insuficiente.
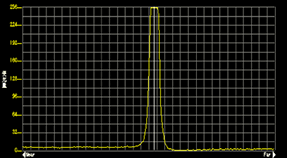
(3) Altura del patrón de onda de luz recibida excesivamente alta
La luz reflejada está muy saturada. En tales casos, se producirá una variación significativa en los valores medidos.
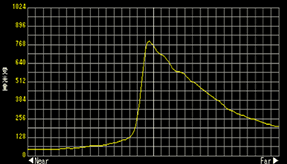
(4) El patrón de onda de luz recibida no es simétrico en sentido horizontal
Al medir resinas y similares, el rayo láser se hunde en el objeto y el patrón de onda de luz recibida se vuelve horizontalmente asimétrico. En estos casos, se realiza un desplazamiento de los valores medidos para compensar la cantidad de hundimiento del valor real.
(5) Patrones de onda de luz recibida múltiples
Cuando se miden objetos transparentes, como el vidrio, se produce más de un pico. Al medir vidrio, se pueden obtener dos picos: el pico reflejado desde la superficie superior y el pico reflejado desde la superficie posterior.
El eje central de la luz emitida por el transmisor del sistema de medición se denomina eje óptico. El diagrama de la región del eje óptico muestra la trayectoria de la luz desde el transmisor hasta el receptor. Dado que no llegará ninguna luz al objeto o al receptor si una plantilla u otro objeto entra en esta región, la medición no será posible.
El voltaje de alimentación es la tensión necesaria para el funcionamiento del dispositivo. Con una especificación de 24 VCD ±10%, se requiere una fuente de alimentación de CD de 24 V con fluctuaciones de no más de ±2.4 V.
El consumo máximo de corriente representa la cantidad de corriente que se consume al hacer funcionar el dispositivo. Es necesario seleccionar un dispositivo que tenga una fuente de alimentación con una capacidad mayor que el consumo máximo de corriente.